Chapter 3 HW (1-3)
Assignment PDF
1.
- Torque: A measure of the rotational force applied to an object, calculated as the product of force and the perpendicular distance from the pivot point $(\tau = F × r).$
- Line of Force Application: The straight line along which a force is applied to an object.
- Moment Arm: The length of the line that is perpendicular to the axis of rotation and connects the axis of rotation to the line of force application.
- Force Couple: A pair of equal and opposite forces between two objects (A acting on B, and B acting on A), as described by Newton’s Third Law.
- Torque Equilibrium: A state where the sum of all torques acting on an object is zero, resulting in no rotational acceleration.
- Net Torque: The vector sum of all torques acting on an object, determining its rotational motion.
- Center of Gravity: The point where the total weight of an object is considered to act, balancing the object in all orientations.
2.
a)
| Biceps Brachii | Vastus Medialis | Vastus Intermedius | Vastus Lateralis | |
|---|---|---|---|---|
| Origin | Coracoid Process of the Scapula (Short Head), Supraglenoid Tubercle of the Scapula (Long Head) | Intertrochanteric Line and Medial Lip of Linea Aspera | Upper 2/3 of the Anterior and Lateral Surfaces of the Femur | Greater Trochanter and Upper Lateral Surface of the Linea Aspera |
| Insertion | Radial Tuberosity and Bicipetal Aponeurosis | Patellar Tendon | Patellar Tendon | Patellar Tendon |
b)
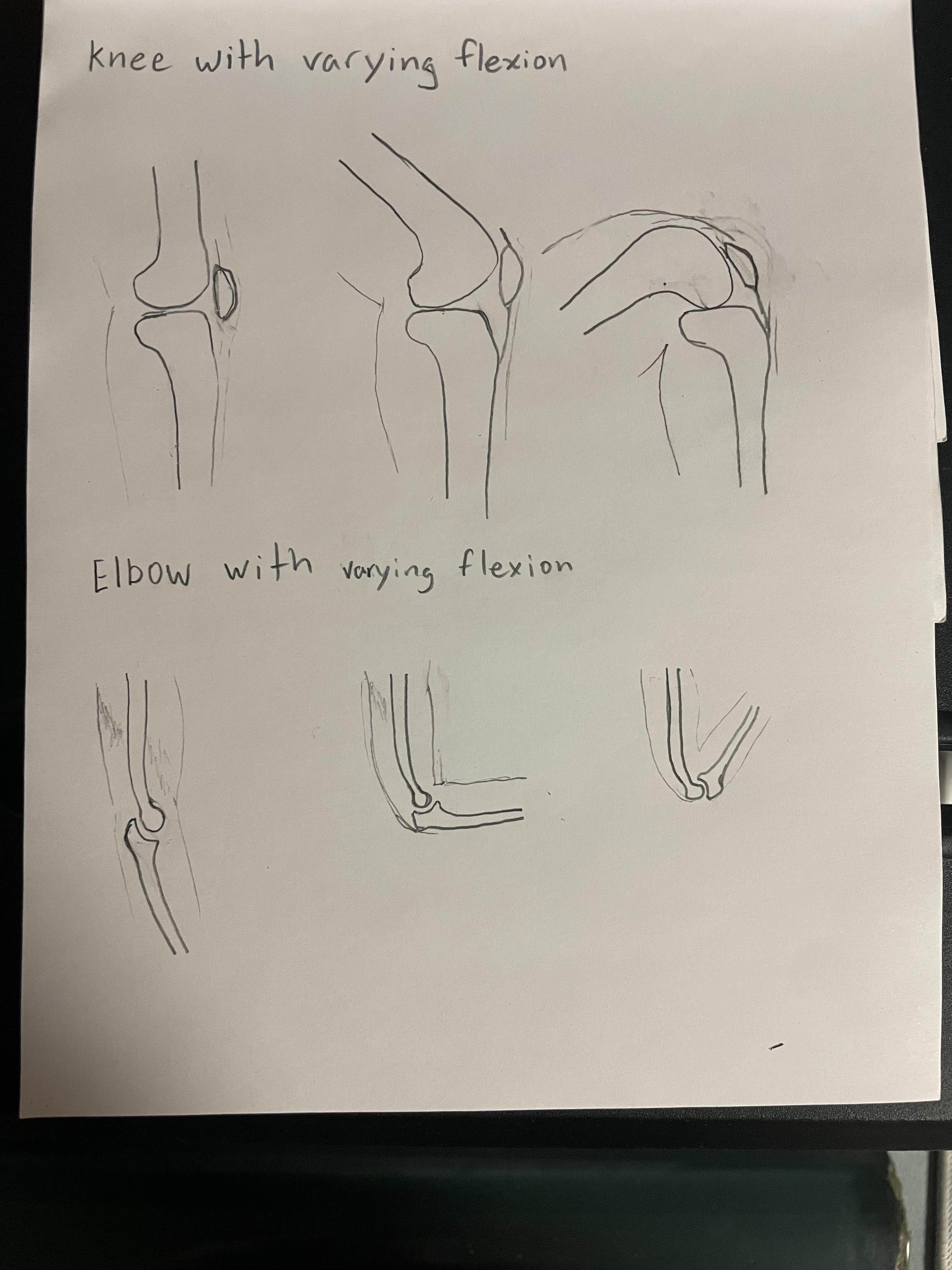
c)
The moment arm of the patellar tendon at knee appears longer in extended and semi-flexed positions, and shorter in the fully flexed position. The moment arm of the biceps brachii looks lonker in the semi-flexed position, and shorter in the extended and fully flexed positions.
3.
a)
An object is in static equilibrium when it is at rest (not moving) and remains at rest, meaning it has no translational or rotational acceleration. For this to occur, two conditions must be satisfied: firstly, the net force acting on the object must be zero (meaning it is in translational equilibrium) and secondly, the net torque acting on the object must be zero (meaning it is in rotational equilibrium).
b)
$\Sigma F = 0$:
This means that the sum of forces, or net force, acting on the object is zero. In other words, this describes translational equilibrium.
$\Sigma F_x = 0$:
This is the $x$ component of the net force equation.
$\Sigma F_y = 0$:
This is the $x$ component of the net force equation.
c)
The three equations above are:
- A net force eqution describing translational equilibrium.
- The $x$ component of this net force equation.
- The $y$ component of this net force equation.
If we wanted to fully represent static equilibrium we would only need the two equations: $$\begin{align*} \Sigma \overrightarrow{F} &= \overrightarrow{0}, \\ \Sigma \overrightarrow{\tau} &= \overrightarrow{0}, \end{align*}$$ and then given the number of dimensions we were working in, we could break these vector equations down into that number of component equations. For example, breaking the net force equation into its components in a 2d system would yield the $x$ and $y$ component equations that we saw in part b). If we break both the net force and net torque equations into their components in a 3d system, we get $$\begin{align*} \Sigma F_x &= 0, \\ \Sigma F_y &= 0, \\ \Sigma F_z &= 0, \\ \Sigma \tau_x &= 0, \\ \Sigma \tau_y &= 0, \\ \Sigma \tau_z &= 0. \end{align*}$$ By this logic, static equilibrium in an $n$-dimensional system gives us $2n$ values to solve for, as we know that both net force and net torque on each axis will equal zero.
References
Visible body suite. (n.d.). Retrieved February 4, 2025, from https://websuite.visiblebody.com/